
Shot in Tamarindo, Costa Rica
Sicong Jiang
Final-year PhD @ McGill | Student Researcher @ Google DeepMind
I am a PhD candidate at  McGill University Centre for Intelligent Machines (CIM), currently at
McGill University Centre for Intelligent Machines (CIM), currently at 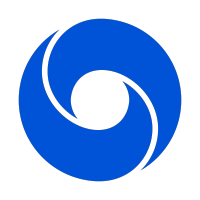 Google DeepMind as a Research Intern. I previously served as Research Director at
Google DeepMind as a Research Intern. I previously served as Research Director at ![]() Abaka AI. In the open-source AI community, I'm a core contributor at
Abaka AI. In the open-source AI community, I'm a core contributor at  2077AI and work closely with the
2077AI and work closely with the  M-A-P. I received my Master's degree in Electrical and Computer Engineering from the
M-A-P. I received my Master's degree in Electrical and Computer Engineering from the  Georgia Institute of Technology.
Georgia Institute of Technology.
My research focuses on building reliable and robust AI agents powered by Large Language Models and multimodal foundation models. I develop structured benchmarks, agent environments, and reward models to improve open-ended reasoning, long-horizon planning, and robustness. My goal is to bridge foundation models and real-world autonomous systems, enabling agents that are capable and trustworthy.
 GitHub •
GitHub •
 Email •
Email •
Mar 2026
🚀 Excited to join Google DeepMind as a Research Intern in London, UK.Feb 2026
🎉 Two papers accepted by CVPR 2026 (1 Main + 1 Findings).Jan 2026
🎉 One paper accepted by ICLR 2026. Check EditReward.Nov 2025
🎉 One paper accepted (oral) by Bridge Program of AAAI 2026.Aug 2025
🎉 One paper accepted by EMNLP 2025. Check AgentThink.Aug 2025
🤝 Joined 2077AI-Foundation—thrilled to contribute to the AI open-source community!Jul 2025
🚀 Joined Abaka AI as a Research Scientist in Palo Alto, California.Jul 2025
🎉 One paper accepted by ICCV 2025 Foundation Models for AD Workshop. Check VLA4AD Survey.Mar 2025
✉️ Invited to contribute to Humanity's Last Exam, an AGI reasoning benchmark.Feb 2025
🎉 One paper accepted by ICLR 2025 Trustworthy LLM Workshop. Check SparseAttack-LLM4TS.Jan 2025
🎉 One paper accepted by AISTATS 2025. Check Attack-LLM4TS.AI Agents, Benchmarks & Evaluation
EditReward: A Human-Aligned Reward Model for Instruction-Guided Image Editing
K. Wu*, S. Jiang*, M. Ku, P. Nie, M. Liu, W. Chen
ICLR 2026
Website • Paper • GitHub ⭐ 120
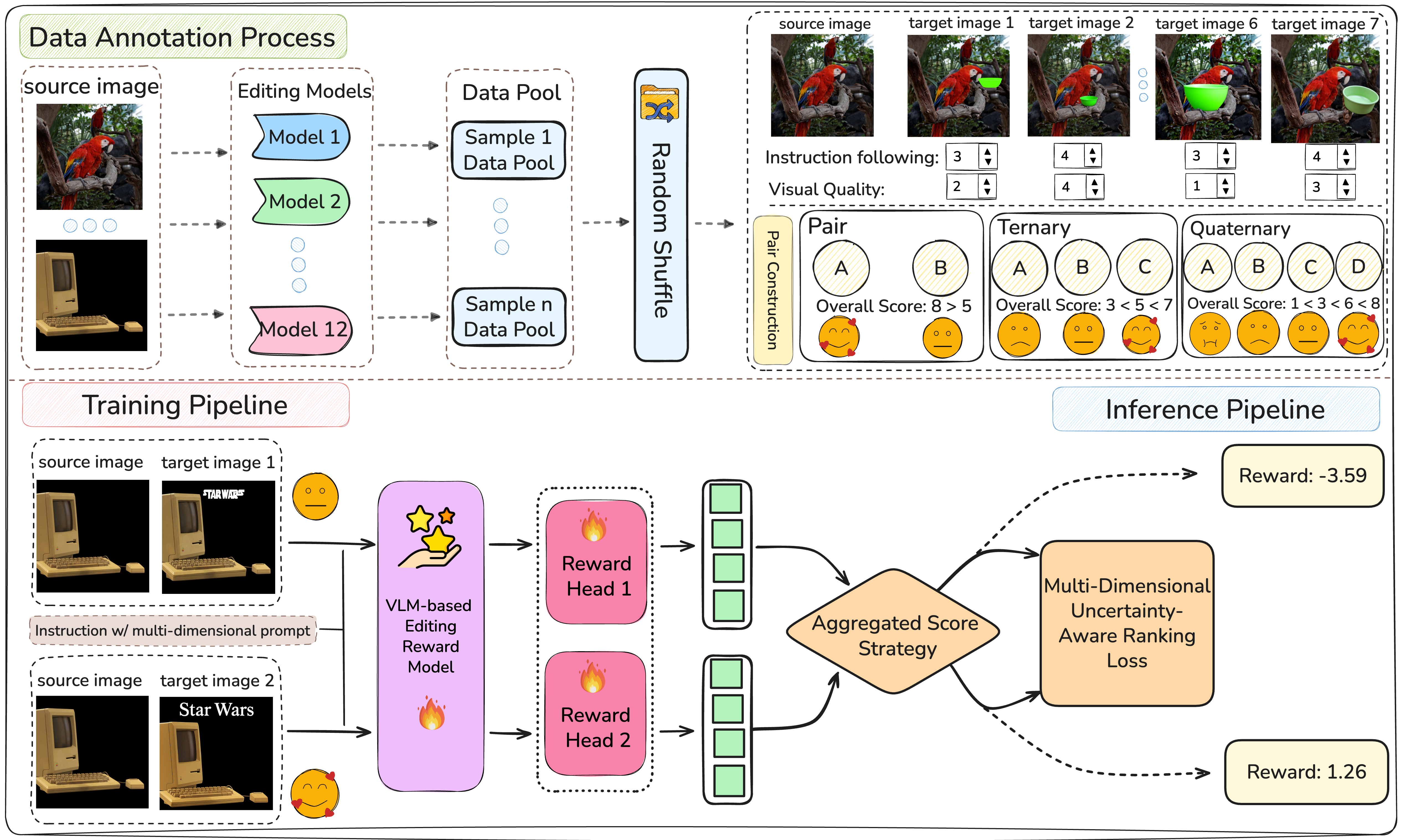
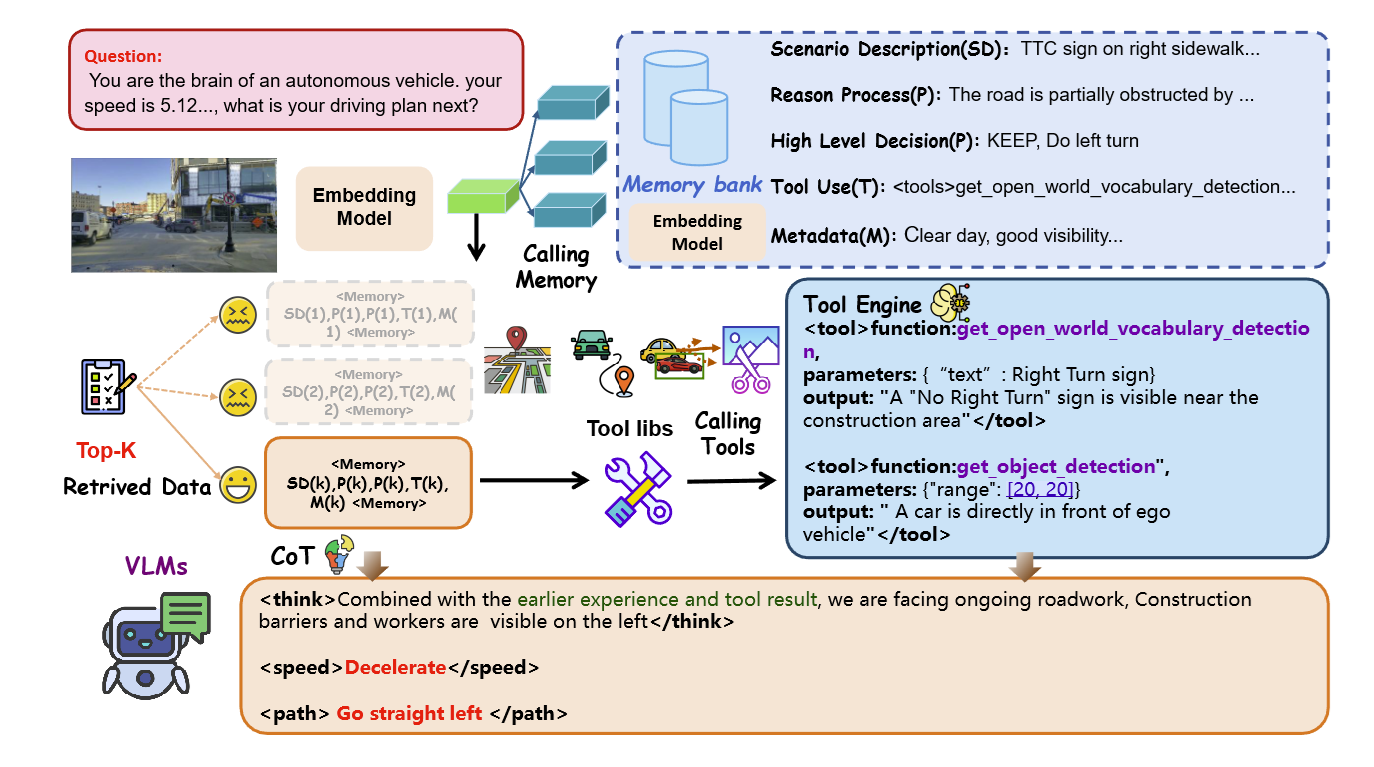
AgentThink: Tool-Augmented Reasoning in VLMs for Autonomous Driving
K. Qian*, S. Jiang*, Y. Zhong*, Z. Luo, Z. Huang, et al.
EMNLP 2025
Website • Paper • GitHub ⭐ 138
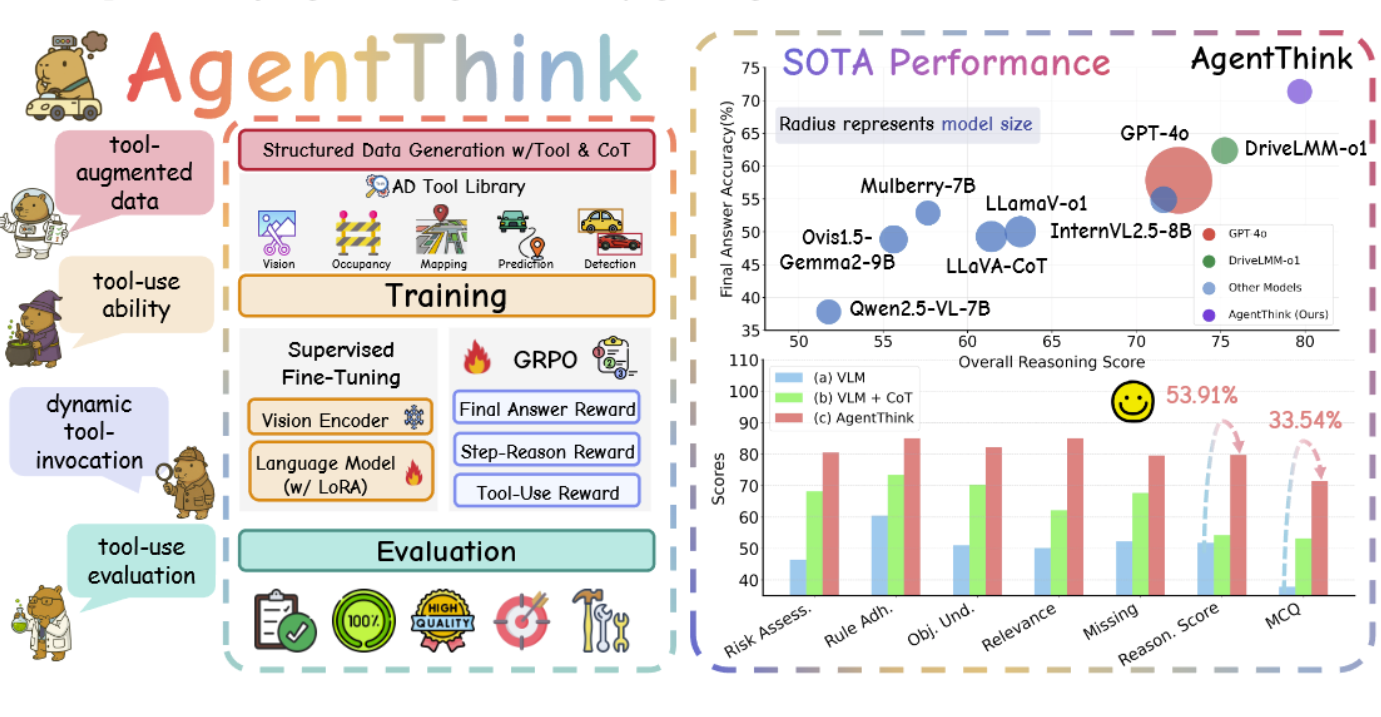
VeriWeb: Verifiable Long-Chain Web Benchmark for Agentic Information-Seeking
2077AI Team
Under review, 2025
Website • Paper • GitHub ⭐ 86 • HuggingFace Daily Paper #2
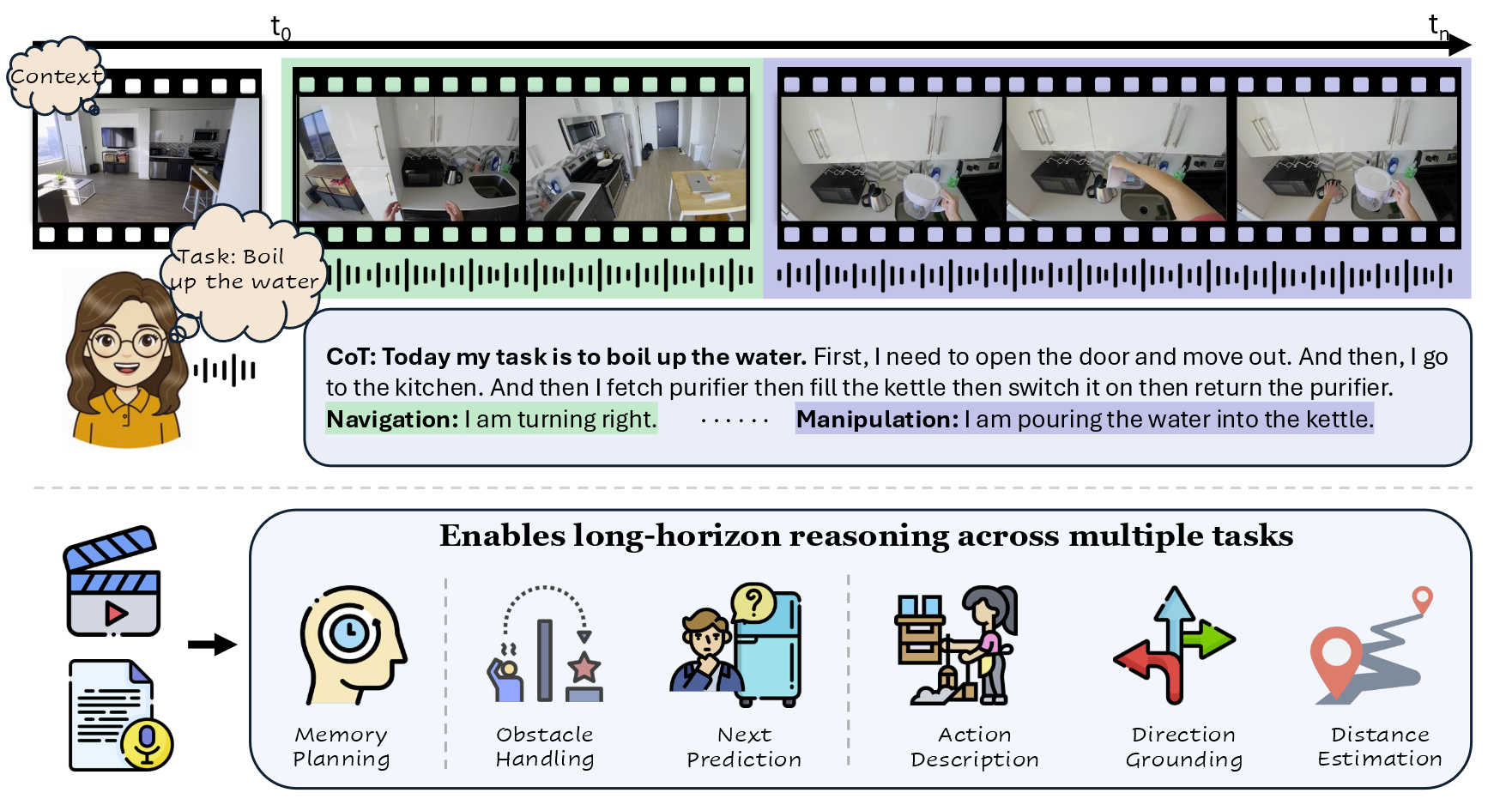
EgoTL: Egocentric Think-Aloud Chains for Long-Horizon Tasks
L. Liu, D. Li, Y. Liang, S. Jiang, H. Vijay, H. Hu, et al.
CVPR 2026 Findings
Releasing soon
Foundation Models: Robustness, Safety & Applications
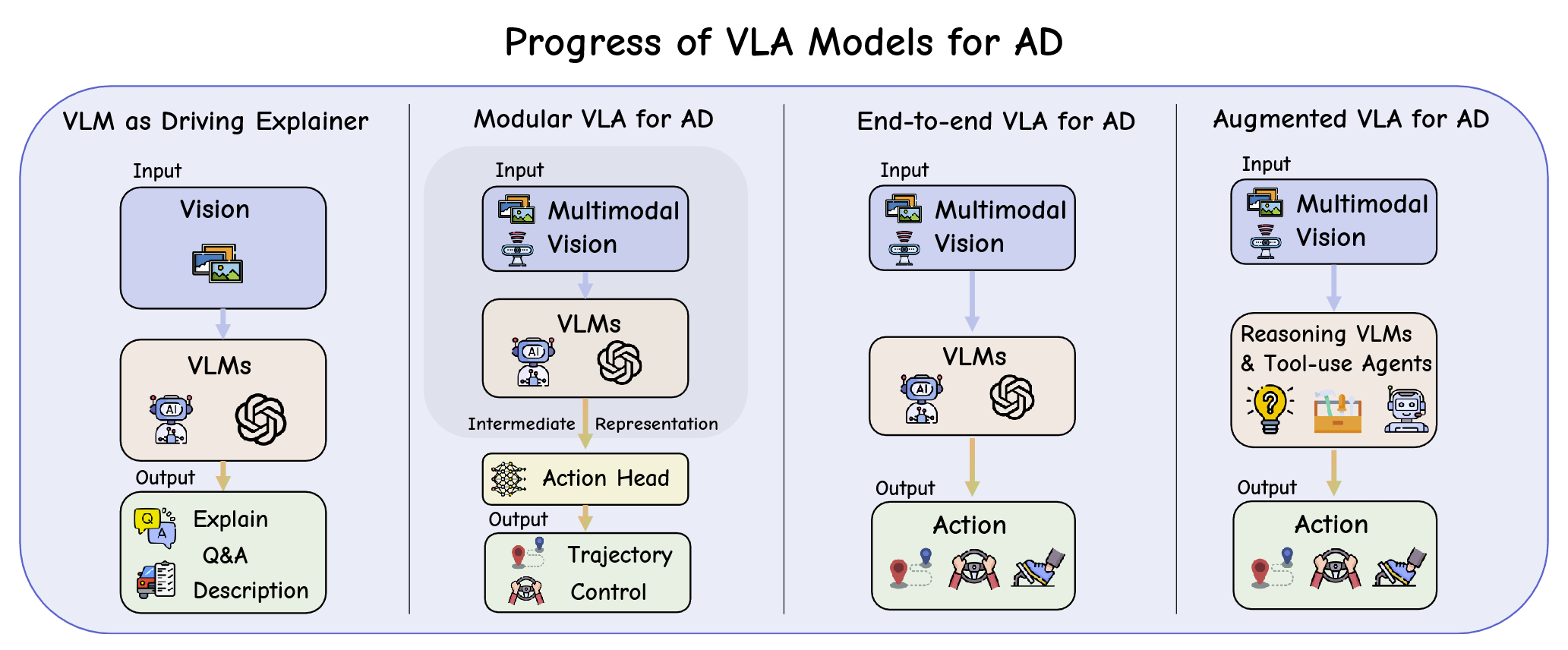
A Survey on Vision–Language–Action Models for Autonomous Driving
S. Jiang*, Z. Huang*, K. Qian*, Z. Luo, T. Zhu, et al.
ICCV Workshop, 2025
Paper • GitHub ⭐ 532 • Tech Channel Report
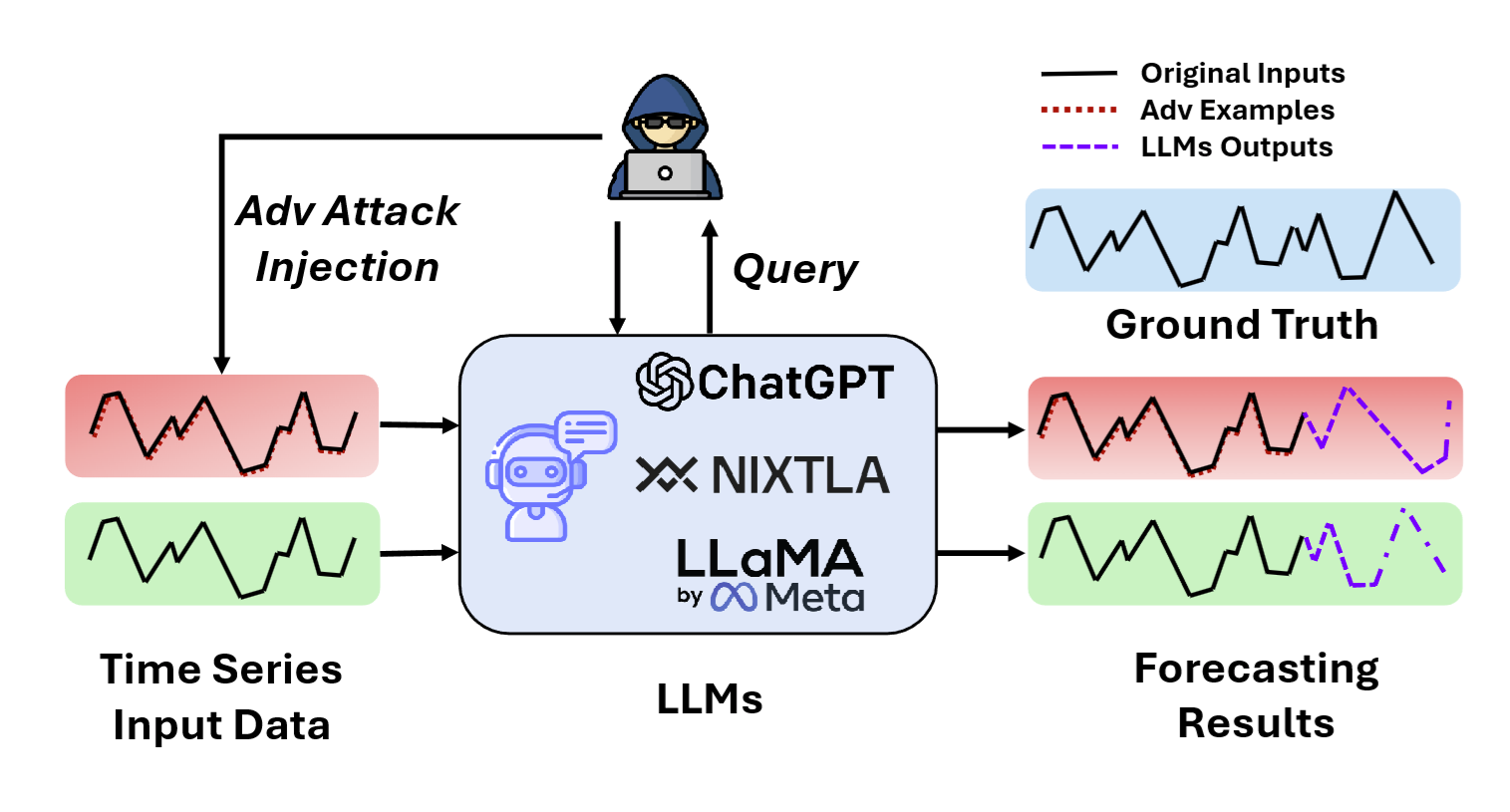
Adversarial Vulnerabilities in Large Language Models for Time Series Forecasting
F. Liu*, S. Jiang*, L. Miranda-Moreno, S. Choi, L. Sun
AISTATS 2025
Paper • GitHub ⭐ 15
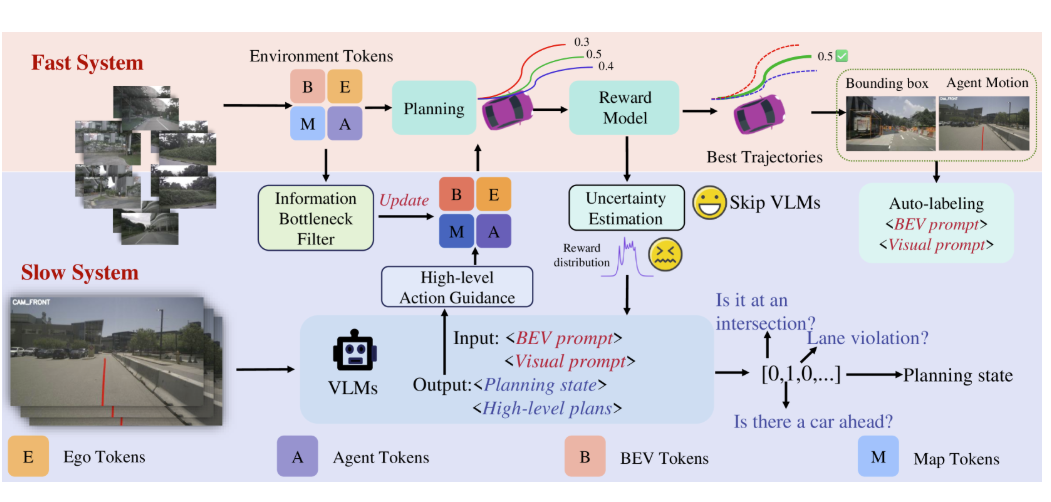
FASIONAD+: Enhanced Safety in Autonomous Driving with Adaptive Feedback
Z. Luo*, S. Jiang*, K. Qian*, Z. Huang, J. Miao, et al.
ICRA 2026
Paper
MTRDrive: Memory-Tool Synergistic Reasoning for Robust Autonomous Driving in Corner Cases
Z. Luo*, K. Qian*, J. Wang, Y. Luo, J. Miao, Z. Fu, Y. Wang, S. Jiang, Z. Huang, et al.
ICRA 2026
Paper
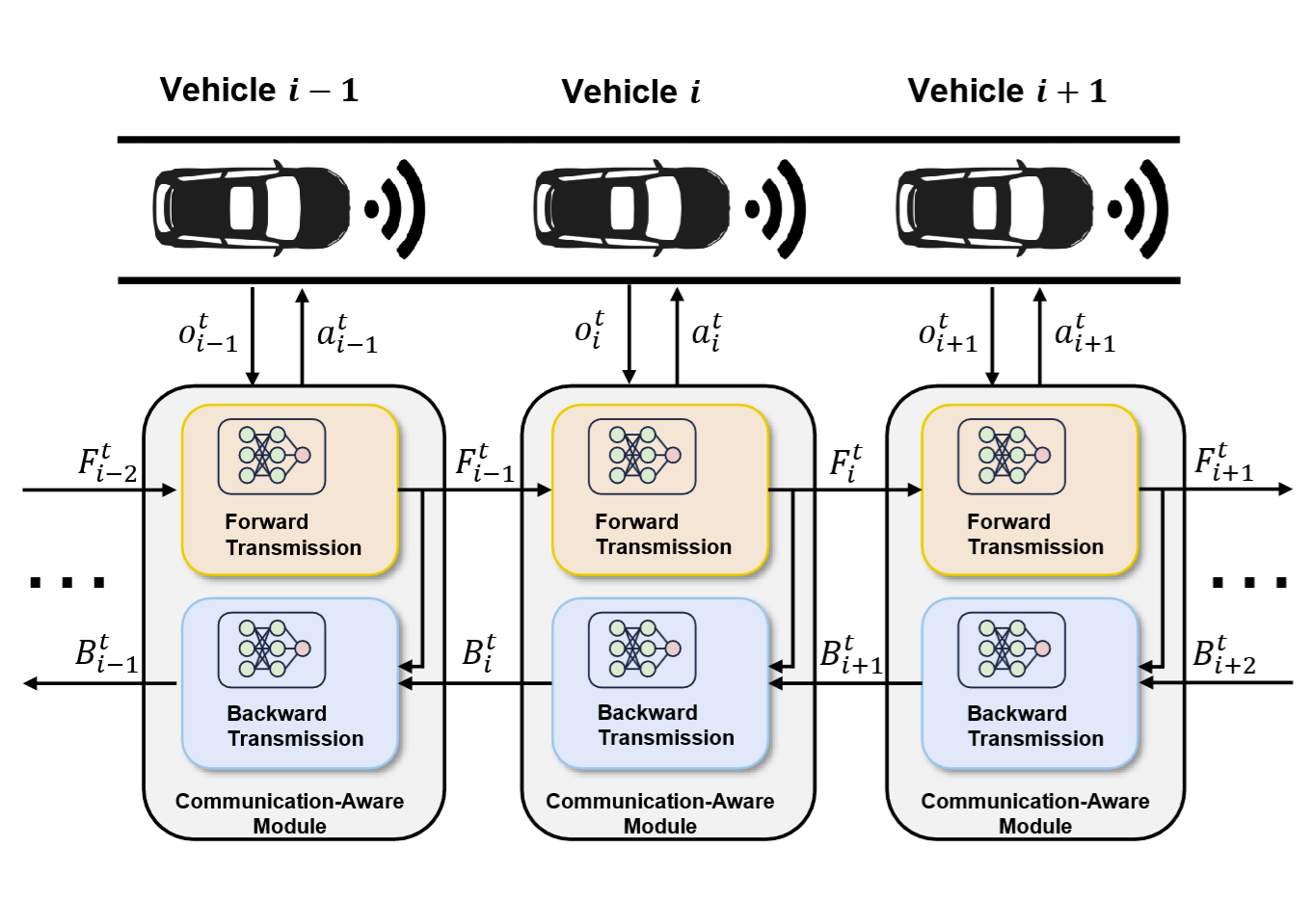
Communication-Aware Reinforcement Learning for Cooperative Adaptive Cruise Control
S. Jiang, S. Choi, L. Sun
TRB Annual Meeting (Oral), 2024
Paper

LLM-as-Judge for Open-ended Tasks: Researching on rubric-based LLM evaluators for open-ended outputs and trajectories, and systematically probing judge failure modes to support trustworthy agent self-improvement.
Self-evolving Agent: Building agents that iteratively improve their policies via self-refinement loops, with a focus on reliable feedback signals and long-horizon behavior.
Research: As a founding member of the Research team, I lead benchmarking and evaluation for agentic and multimodal LLMs. I led the EditReward project and co-developed large-scale benchmarks including SuperGPQA and VeriWeb.
Advanced Dataset & Pipeline Design: Led several zero-to-one pipeline builds—architecting and deploying high-difficulty dataset solutions and production pipelines from scratch across coding, IMO-level math, multimodal data, agentic trajectories, and RL environments. These datasets and pipelines are directly used for model training and evaluation for multiple frontier AI labs.
Multimodal Data Pipelines: Built data pipelines and multi-stage QA systems for multimodal LLM projects, overseeing large-scale annotation workflows and label consistency.
Dataset Quality & Validation: Conducted analysis and validation to refine annotations and ensure robust datasets for LLM post-training.
AgentThink (Agent Reasoning): Led a collaboration with Xiaomi and Tsinghua on tool-augmented reasoning for vision-language models in autonomous driving, achieving +54% answer accuracy on open-source models.
Adversarial LLM4TS: Developed a black-box attack framework and public benchmarks for LLM-based time-series forecasting, in collaboration with the Amazon Chronos and Nixtla teams.
Multi-Agent RL Exploration: Developed a multi-agent search strategy combining MADDPG with frontier-based exploration, and built evaluation benchmarks for exploration efficiency.
Awards
2024
McGill Engineering Doctoral Award (MEDA)2021
TISED Doctoral Recruitment Award (DRA), McGill University2019
Outstanding Graduate of Liaoning Province; Most Influential Graduate, Northeastern University2017
National 1st Prize, China Undergraduate Mathematical Contest in Modeling2017
1st Class Academic Scholarship, Northeastern UniversityAcademic Service
Workshops Organizer
- CVPR 2026 Workshop on Video Generative Models: Benchmarks and Evaluation
- ICCV 2025 Workshop on Memory and Vision
- COLM 2025 Workshop on AI Agents: Capabilities and Safety
Conferences Reviewer
- Advances in Neural Information Processing Systems (NeurIPS)
- International Conference on Learning Representations (ICLR)
- International Conference on Artificial Intelligence and Statistics (AISTATS)
- IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
- International Conference on Computer Vision (ICCV)
- Conference on Language Modeling (COLM)
- Conference on Empirical Methods in Natural Language Processing (EMNLP)
- Association for the Advancement of Artificial Intelligence (AAAI)
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- IEEE International Conference on Robotics and Automation (ICRA)
- IEEE Intelligent Transportation Systems Conference (ITSC)
Journals Reviewer
- IEEE Robotics and Automation Letters (RA-L)
- Transportation Research Part C: Emerging Technologies (TRC)
- IEEE Transactions on Intelligent Transportation Systems (T-ITS)
I enjoy music by Tyler, the Creator, SZA and Chappell Roan.
Sometimes I also listen to Taylor Swift, Olivia Rodrigo and 9m88.
My favorite influencer is Allywoo on RedNote.
Cat: Bobo, a golden shaded British Shorthair who is good at programming with buttons.

